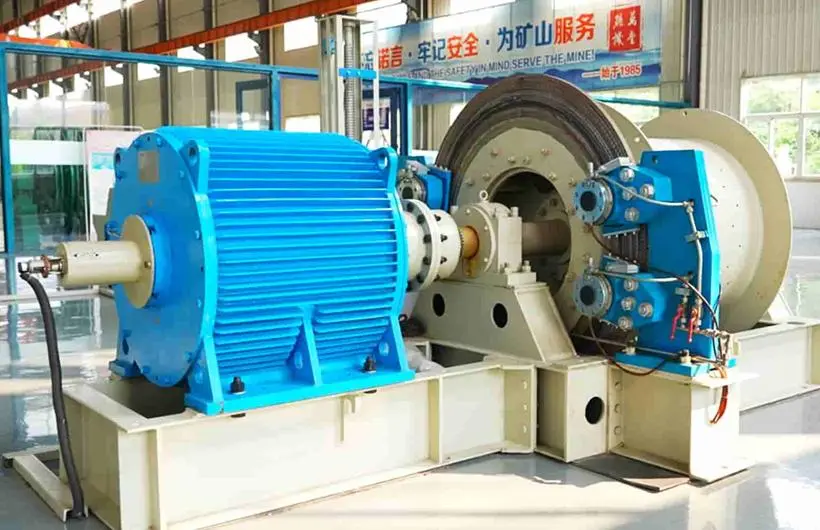





JTP/JK permanent magnet mine hoists are hoisting winch for metal ,non-metal mines, suitable for surface yards, inclined roadways, and small-to-medium vertical shafts. They provide efficient, reliable, continuous hoisting of ore, equipment, and personnel. Compact structure and simple foundation make them ideal for space-constrained mining projects.
Structure Features & Working Principle:
Magnet mine hoists new generation core mine hoisting equipment, adopting permanent magnet synchronous motor direct-drive technology. Design eliminates intermediate transmission parts reducers couplings, forming ultra-compact integrated motor-drum drive structure.It surpasses conventional hoists in lifting efficiency, operational reliability, ease of maintenance and space utilization.
Power Generation: Inverter injects phase/frequency controllable 3-phase sine current into PM motor stator → forms rotating magnetic field in air gap.
Direct Drive Coupling: Rotating magnetic field interacts with PM rotor magnets → generates electromagnetic torque. Torque acts directly on drum, no intermediate losses.
Intelligent Control: Control system reads rotor (drum) position via encoder → achieves precise "Position-Speed-Torque" triple closed-loop control:
○Position Loop: Controls final stopping accuracy of skip/cage (±10mm max).
○Speed Loop: Follows preset speed profile (e.g., S-curve) → smooth acceleration/deceleration.
○Torque Loop: Adjusts output torque in real time based on load → enables advanced functions (hold, anti-slip).
High Efficiency Direct Drive: Permanent magnet synchronous motor directly drives drum efficiency over 96%. Energy traditional hoists (efficiency below 85%).
Ultimate Reliability: Greatly shortened drive chain → mechanical failure points reduced by >60%. reliability significantly improved.
Compact & Smart: Highly integrated design → footprint reduced 30%-50%. Deep integration dedicated VFD → speed control.
Easy Maintenance: Daily maintenance limited bearings, brakes, control system → workload reduced ~40% vs. conventional units.
| Technical parameter table of permanent magnet internal and external mining hoist/winch | ||||||||||
| Model | Drum | Max static tension |
Max static tension difference |
Dia | Lifting Height/Transport Length | Max hoisting speed |
||||
| Number | Dia | Width | Single | Double | Triple | |||||
| mm | KN | mm | m | m/s | ||||||
| JTP-1.2×1.0PYC | 1 | 1200 | 1000 | 30 | / | 20 | 134 | 297 | 472 | 2.6 |
| JTP-1.2×1.2PYC | 1200 | 168 | 371 | 582 | ||||||
| JTP-1.6×1.2PYC | 1600 | 1200 | 45 | 24 | 172 | 382 | 601 | 4.1 | ||
| JTP-1.6×1.5PYC | 1500 | 226 | 491 | 767 | ||||||
| JK-2×1.5PYC | 2000 | 1500 | 60 | 25 | 295 | 586 | 914 | 7 | ||
| JK-2×1.8PYC | 1800 | 366 | 730 | 1132 | ||||||
| JK-2.5×2PYC | 2500 | 2000 | 90 | 31 | 403 | 802 | 1245 | 9 | ||
| JK-2.5×2.3PYC | 2300 | 473 | 944 | 1460 | ||||||
| JK-3×2.2PYC | 3000 | 2200 | 130 | 37 | 447 | 887 | 1378 | 12 | ||
| JK-3×2.5PYC | 2500 | 518 | 1030 | 1595 | ||||||
| JK-3.5×2.5PYC | 3500 | 2500 | 170 | 43 | 582 | 1185 | 1798 | 12 | ||
| JK-3.5×2.8PYC | 2800 | 648 | 1318 | 2000 | ||||||
| Note 1: Max lifting speed is estimated value based on nominal drum diameter and single-layer winding. Note 2: Max lifting speed shall not exceed the specified values in the table. Note 3: Lifting height and conveying length are calculated based on maximum steel rope diameter. Note 4: Ratio of drum diameter to rope diameter ≥80 for surface winders, ≥60 for underground winders. |
||||||||||



